


UWB电站人员定位
为了防止变电站工作人员误入危险区域,设计了一种基于UWB的变电站运维人员定位系统。该系统采用基于时间测距协议中的双边双程测距,利用基站间抢占标签信号的时间差对各个基站进行依次测距,在上位机中每间隔固定时间对标签进行一次定位。与以往基于时间的系统相比,本系统不要求设备时间同步,并能够有效减少时钟漂移的影响,降低系统功耗。实测结果表明,测距精度误差不大于10cm,定位精度误差不超过10cm ,能够满足变电站运维人员追踪定位系统的厘米级精度要求。

电力系统的安全有效运行是人们日常生活、工业和农业生产的重要保障,变电站是其中不可或缺的一环。变电站的正常运作需要变电站内工作人员的例行巡检,但是变电站中存在高危区域。为了避免巡检工作人员在巡检过程中误入非工作区域,造成重大的生命财产安全事故,可以通过要求变电站作业人员随身携带标签,进行实时定位,这样一旦工作人员误入危险作业区域或者非作业区域时,监控平台就可以及时提醒工作人员迅速撤出该区域,为变电站安全生产提供重要保障。
变电站定位技术概述
由于变电站室内环境复杂,在能提供高精度 定位的同时,对选取的定位技术还要求具有良好的穿透性,较强的抗干扰性、功耗低和安全性高等特点。相比于其他无线定位技术,超宽带具有抗干扰能力强、带宽极宽、传 输速率快、功率消耗小、时间分辨率高和定位精度 高等诸多优势,完全适合应用于变电站巡检统 。
UWB中常见的基于位置关系测距方法有4种,包括基于到达角度法基于信号强度法、基于到达时间法和基于到达时间差法 。 由于变电站的工作环境中障碍物较多,导致 测得的角度非直达角度,而UWB带宽较宽,因此,基于AOA定位的方案不适用于变电站中。基于RSS的定位方案建立的模型一般为静态模型, 而携带标签的变电站运维人员巡检时一直处于移 动状态,这样会导致测量误差加大,造成定位失准 。目前,应用于变电站中的测距方案主要是 采用基于TDOA的测距方法。该方法通信方式简单,理论定位精度高。

系统的工作流程如下:首先,标签进入搜索阶段,寻找可供测距的基站,标签每隔固定时延采用广 播式发送消息 ,信号先到达的基站回复标签,消息包中携带该基站的ID,直到定时结束 。然后,标签开始进入测距阶段,发出信号给该基站,基站接收到信息后返回附加时间戳的另一消息包。标签记录每个消息到达时间和发送时间,并将时间 戳附在消息帧的数据域中并发送回基站,由基站提取最终数据帧中的时间戳,计算无线信号在空 中飞行的时间 。已知信号的传播速率为电磁波速率,可计算出基站与标签之间的距离。各基站将距离数据传送给服务器,服务器每个固定时间段根据定位算法测算出标签当前的坐标。
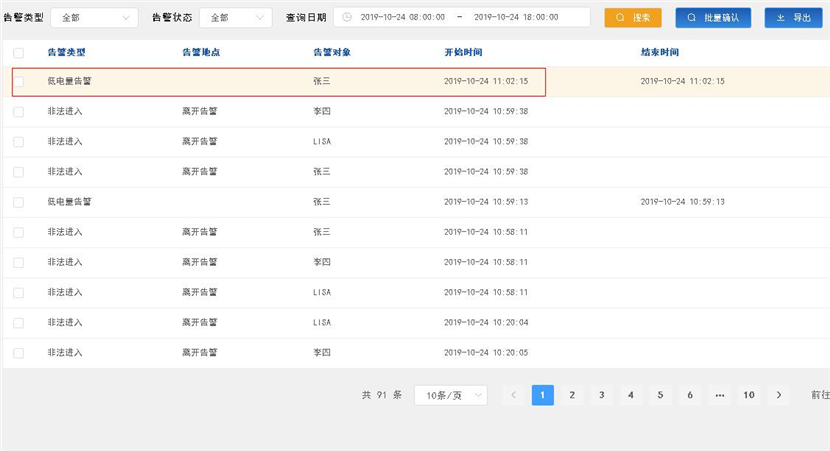
告警信息列表显示人员佩戴的标签的实时电量,如果电量过低将会触发告警,告警支持多种告警信息显示。
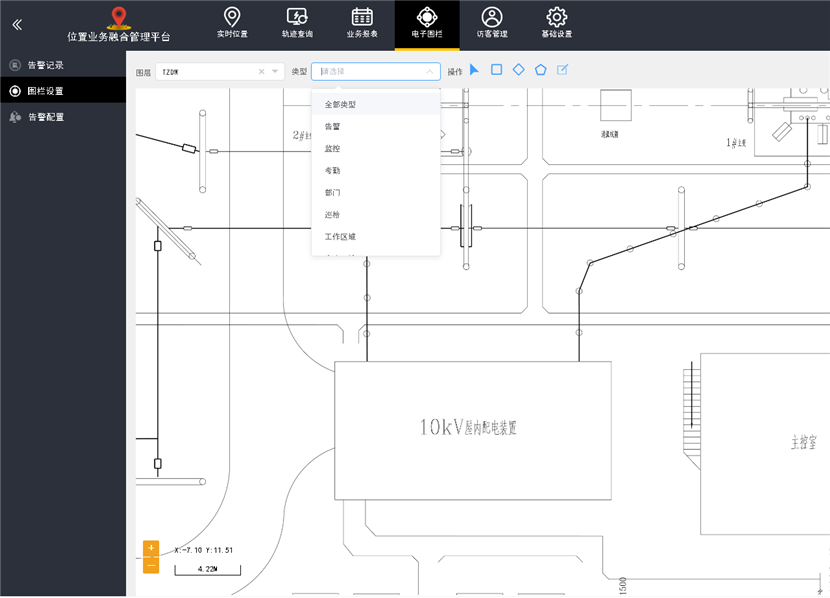
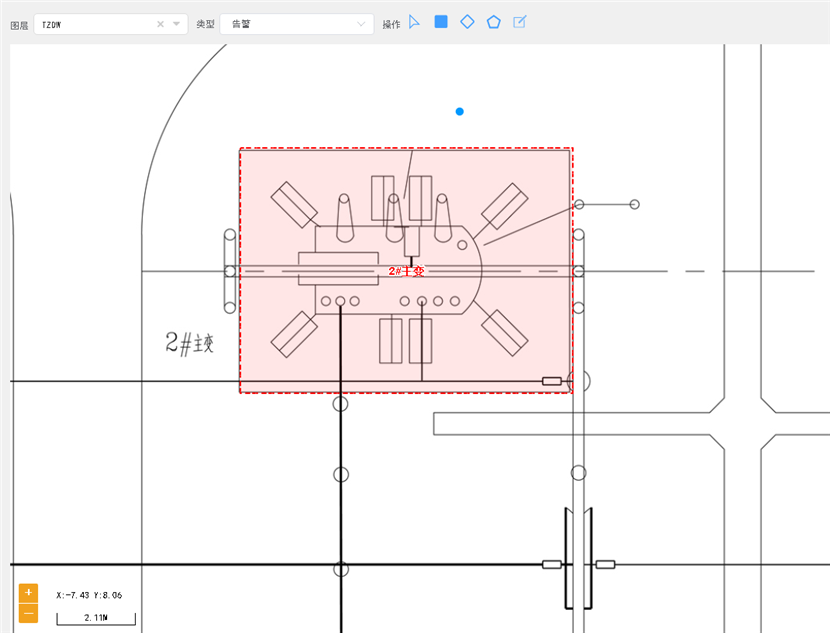
支持将任意区域设定为电子围栏区域,比如我们可以将某一区域设置为告警区域,当维修或者外来人员等没有经过授权的人员进入改区域后将会触发报警同时向人员佩戴的信标下发震动信息提醒。
(1)目标对象的巡视跟踪、作业行为监控、当前位置跟随。巡视时按照设定的巡视路线进行导航,巡视路径实时展示、对漏巡等行为进行监测;对误近危险点、随意穿越、误选误动作业目标等现象做到及时提醒,防患于未然。
下图所示为2#主变区域被设置为了告警区域。
告警设置可以设置电子围栏有效时间,告警类型和关联对象。

(2)监控软件信息系统建设。通过变电站端安装定位基站获取数据,并远程传输到后台,在监控中心安装中心服务器并部署后台系统,接收前端数据,完成实时监测显示、分析、查询和统计等功能。
如下图所示为现场UWBLOC基站安装图。








-
化工、石化、炼油厂人员及车辆定位方案
化工厂人员、车辆定位管理系统具有如下的特点:华星智控化工厂人员定位管理系统融合LORA、4G/5G通信技术,基于自研的室内外高精度定位物联网算法,实现对化工厂人员、车辆的实时精确定位,系统具有高精度,免布线,高实时性,高可靠稳定性的核心优势特点。
-

行车、天车防碰撞方案
通过在行车上安装精准测距基站,基站之间实时互相测距,设定一个危险距离R,当行车2和行车1或者行车3的距离小于R时,就会触发继电器工作启动声光报警器提醒司机或者切断电源让天车停止工作。
-

矿山人员车辆定位管理解决方案
矿山人员车辆定位方案是一种设计用于跟踪矿区内运载矿山人员的车辆位置的系统。 该系统通过提供车辆的实时位置信息,对于确保人员安全至关重要。 以下是矿山人员车辆定位方案的一些关键组成部分:GPS跟踪:该方案利用GPS(全球定位系统)跟踪矿山人员车辆的位置。 GPS 跟踪提供准确的位置数据,可用于监控车辆的速度和方向。车辆跟踪软件:从车辆收集的 GPS 数据被发送到中央系统,该系统使用车辆跟踪软件在地图上显示车辆的实时位置。通讯设备:该方案还需要无线电或手机等通讯设备,让车上人员能够与控制室和应急服务部门进行通讯。地理围栏:地理围栏是一项允许该方案在矿区内设置虚拟边界的功能。 如果车辆进入或离开地理围栏区域,该方案将向控制室发出警报。应急响应:该方案应制定应急响应协议,以防发生事故。 这可能涉及应急小组、疏散计划和急救设备。总体而言,矿山人员车辆定位方案是矿山安全的重要组成部分。 通过提供实时位置数据,该方案可以帮助预防事故并对紧急情况做出快速反应。
-
叉车防碰撞方案
车与人防碰撞:叉车上安装精准测距模块和声光报警器,预先设定好安全距离R,测距模块与人员携带的标签测距L,当距离小于预先设定的安全距离R时就触发测距模块的继电器接通声光报警器工作提醒驾驶员注意。
-

工业智能制造,电力电厂,钢铁治金定位方案
高精度人员、物资、车辆精准定位系统基于多维技术融合方案,可以实现10~30厘米的精准位置数据采集,可用于工业智能智能制,造汽车装配,电力电厂,钢铁治金等行业实现对工厂内的人、车、物、料等的精确定位、无缝追踪、智能调配与高效协同,大幅提升工厂的精益生产及精细化管理水平。
-
数据机房人员定位方案
通过在机房内布设有限数量微基站,实时精确地定位巡检人员上的微标签位置,零延时地将巡检人员位置信息显示在机房控制中心,进行安全区域管控、人员在岗监控等。精度达到10厘米级,精确管控以优化流程、合理调度安排、提高数据机房的巡检效率。
-
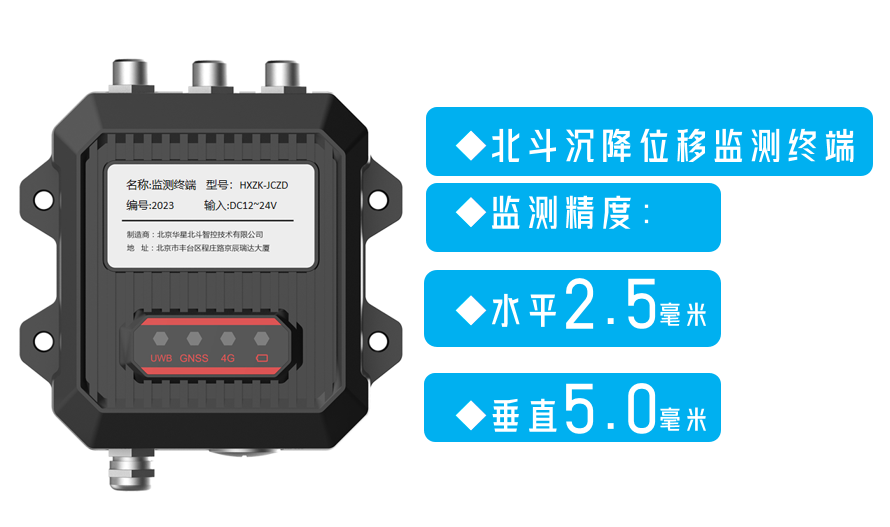
北斗储油罐、滑坡、采空区位移变形监测方案
北斗位移监测可实现水平±2.5毫米,垂直±5.0毫米的位置变化监测,可以用于滑坡,道路边坡,采空区,尾矿库,水库大坝,铁塔,储油罐等的形变监测,通过长期的连续监测,掌握被监测体的位置变化趋势,避免灾害事故发生。
-
隧道错车智慧调度方案
铁路隧道施工过程中,由于隧道宽度比较窄,只在固定的距离处有错车位置,当车辆交汇位置距离错车位置比较远的时候车辆需要倒车到错车位置才能错车,这就会导致花费很多时间来错车,大大的降低了工作效率。










